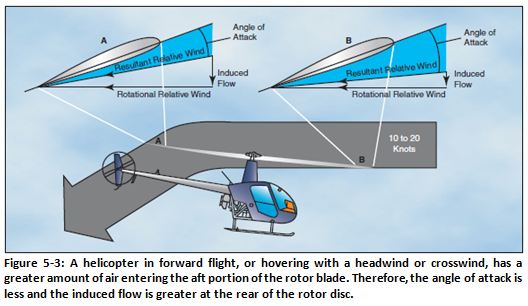
I'm not a pilot, so bear with me. When a helicopter is in a dead hover, the main rotor keeps a constant pitch as it rotates through it's 360 degree circle. Now let's say you put the helicopter into forward motion. Say 80 knots. If the main rotor is rotating clockwise, as the blade comes into the 9:00 O'clock position, it will have an extra 80 knots of air blowing over it because of this forward motion. In contrast when that blade gets to the 3:00 O'clock position, it will have 80 knots less air blowing over it. For a difference of 160 knots in just 180 degrees of rotor rotation.
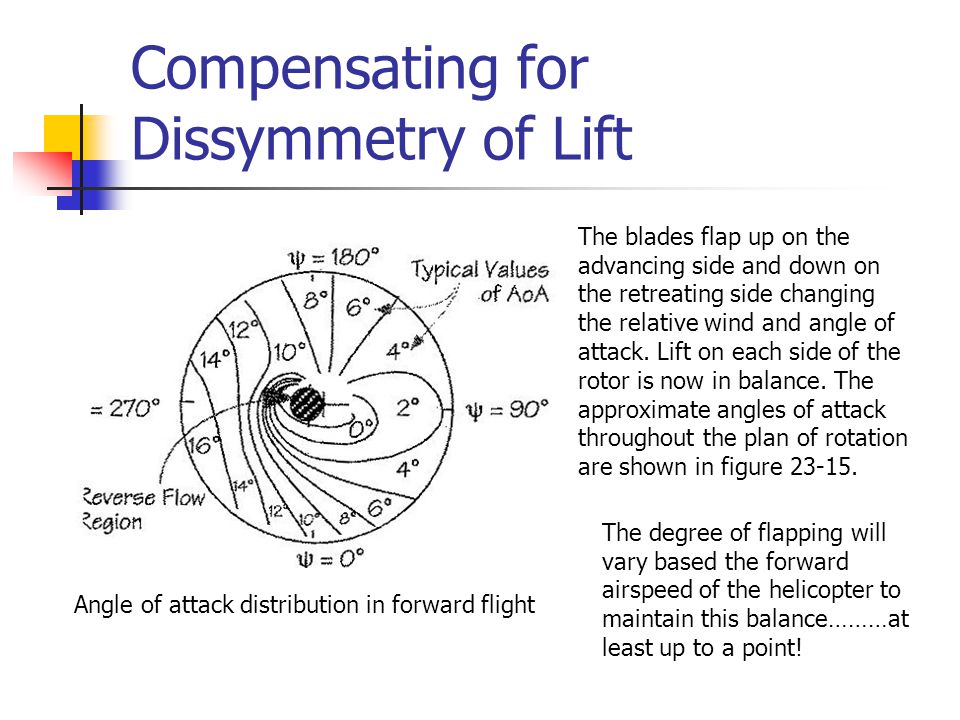
So the main rotor has to increase pitch on the blade when it gets to the dead side, (3:00 O'clock position), of the main rotor in order to make up for that loss of lift, that is created by less airspeed over the rotor blade in the 3:00 O'clock position. This difference in pitch obviously increases as the forward speed of the helicopter increases. And it becomes non existent in a motionless hover. My question is how does the helicopter do that? If the pilot did it with cyclic stick input, he would be pushing the cyclic stick further to the left, (assuming clockwise main rotor rotation), the faster he flew. Is there some automated feature built into the controls that controls this?
And continuing with this, if the pilot were to put the helicopter into a shallow dive, and deliberately over speed it, would the helicopter eventually enter an uncontrolled roll? Because of it's inability to create lift on the dead side of the main rotor, as the speed increased to the point it could no longer counteract the loss of lift on that side with pitch increase of the rotor blade itself.
So the main rotor has to increase pitch on the blade when it gets to the dead side, (3:00 O'clock position), of the main rotor in order to make up for that loss of lift, that is created by less airspeed over the rotor blade in the 3:00 O'clock position. This difference in pitch obviously increases as the forward speed of the helicopter increases. And it becomes non existent in a motionless hover. My question is how does the helicopter do that? If the pilot did it with cyclic stick input, he would be pushing the cyclic stick further to the left, (assuming clockwise main rotor rotation), the faster he flew. Is there some automated feature built into the controls that controls this?
And continuing with this, if the pilot were to put the helicopter into a shallow dive, and deliberately over speed it, would the helicopter eventually enter an uncontrolled roll? Because of it's inability to create lift on the dead side of the main rotor, as the speed increased to the point it could no longer counteract the loss of lift on that side with pitch increase of the rotor blade itself.